 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPE: Agentic Prompt Enhancer for Image Generation and Editing
May 29, 2026Natural language has become a powerful interface for image generation and editing, yet text-guided visual systems remain highly sensitive to prompt formulation. Semantically similar requests can produce different outputs depending on wording, specificity, and how explicitly visual constraints are stated, motivating prompt enhancement as a trainable component rather than a peripheral user choice. Existing strong enhancers often rely on large, proprietary LLMs such as ChatGPT or Gemini, adding cost, latency, and deployment dependence to the visual generation pipeline. We propose Agentic Prompt Enhancer (APE), a lightweight framework that post-trains small language models (SLMs) as prompt-enhancement agents. APE supports both single-agent rewriting and role-specialized multi-agent enhancement. Its single-agent instantiation, SAPE, rewrites the prompt in one pass, while its multi-agent instantiation, MAPE, decomposes enhancement into a router--rewriter--composer process for handling compositional constraints over objects, attributes, spatial relations, and edits. With task-aware rewards and post-training protocols, APE improves visual alignment and prompt following without modifying the downstream visual model. Experiments on challenging image generation and editing benchmarks demonstrate that post-trained small prompt enhancers reliably outperform their base counterparts, narrowing the gap to closed-source prompt enhancers; in addition, MAPE proves particularly strong on complex compositional tasks within these benchmarks.
Gamma-World: Generative Multi-Agent World Modeling Beyond Two Players
May 27, 2026World models for interactive video generation have largely focused on single-agent settings, where future observations are generated from a single control signal. However, many generated environments require multi-agent interaction: multiple players, robots, or embodied agents act simultaneously within a shared space. Scaling world models to such settings requires a principled multi-agent design: agents should remain independently controllable, permutation-symmetric, and support efficient inference while maintaining consistency across time and perspectives. In this paper, we present our generative multi-agent world model for interactive simulation. It introduces Simplex Rotary Agent Encoding, a parameter-free extension of 3D RoPE that represents agents as vertices of a regular simplex in rotary angle space. This gives each agent a distinct phase while making all agents permutation-equivalent, enabling scalable agent identity without learned per-slot identities or a fixed agent ordering. To avoid dense all-to-all attention across agents, we further propose Sparse Hub Attention, where learnable hub tokens mediate token interaction across agents, reducing cross-agent attention cost from quadratic to linear in the number of agents. For real-time rollout, we distill a full-context diffusion teacher into a causal student that generates temporal blocks sequentially with KV caching, enabling action-responsive generation at 24 FPS. Experiments in multiplayer virtual environments show that our model improves video fidelity, action controllability, and inter-agent consistency over slot-based and dense-attention baselines, while generalizing from two to four players without additional training.
PiD: Fast and High-Resolution Latent Decoding with Pixel Diffusion
May 22, 2026Most practical high-resolution text-to-image systems, including latent diffusion and autoregressive models, perform generation in a compact latent space, and a decoder maps the generated latents back to pixels. Yet the latent-to-pixel decoder is reconstruction-oriented, optimized to invert the encoder rather than synthesize more details, and becomes increasingly costly at megapixel scale. This drawback calls for a more expressive and efficient decoding paradigm. Motivated by recent progress in scalable pixel-space diffusion, we introduce PiD, a Pixel diffusion Decoder that reformulates latent decoding as conditional pixel diffusion, unifying decoding and upsampling into one generative module. By denoising directly in high-resolution pixel space, PiD synthesizes $4\times$ and even $8\times$ upscaled images with low latency. For latent conditioning, a lightweight sigma-aware adapter injects noise-corrupted latents into the pixel diffusion backbone, enabling PiD to decode partially denoised latents and terminate the latent diffusion process early. To further improve efficiency, we distill the model using DMD2, reducing inference to just 4 steps. PiD applies to both conventional VAE latents and semantic latents (e.g., SigLIP, DINOv2) used in recent RAE-based models. PiD decodes latents of $512 \times 512$ images into $2048 \times 2048$ pixels in under 1 second with 13 GB peak memory on a consumer RTX 5090, and as fast as 210 ms on a GB200 GPU, about $6\times$ faster than cascaded diffusion-based super-resolution pipelines with better visual fidelity.
Asset Harvester: Extracting 3D Assets from Autonomous Driving Logs for Simulation
Apr 20, 2026Closed-loop simulation is a core component of autonomous vehicle (AV) development, enabling scalable testing, training, and safety validation before real-world deployment. Neural scene reconstruction converts driving logs into interactive 3D environments for simulation, but it does not produce complete 3D object assets required for agent manipulation and large-viewpoint novel-view synthesis. To address this challenge, we present Asset Harvester, an image-to-3D model and end-to-end pipeline that converts sparse, in-the-wild object observations from real driving logs into complete, simulation-ready assets. Rather than relying on a single model component, we developed a system-level design for real-world AV data that combines large-scale curation of object-centric training tuples, geometry-aware preprocessing across heterogeneous sensors, and a robust training recipe that couples sparse-view-conditioned multiview generation with 3D Gaussian lifting. Within this system, SparseViewDiT is explicitly designed to address limited-angle views and other real-world data challenges. Together with hybrid data curation, augmentation, and self-distillation, this system enables scalable conversion of sparse AV object observations into reusable 3D assets.
Lyra 2.0: Explorable Generative 3D Worlds
Apr 14, 2026Recent advances in video generation enable a new paradigm for 3D scene creation: generating camera-controlled videos that simulate scene walkthroughs, then lifting them to 3D via feed-forward reconstruction techniques. This generative reconstruction approach combines the visual fidelity and creative capacity of video models with 3D outputs ready for real-time rendering and simulation. Scaling to large, complex environments requires 3D-consistent video generation over long camera trajectories with large viewpoint changes and location revisits, a setting where current video models degrade quickly. Existing methods for long-horizon generation are fundamentally limited by two forms of degradation: spatial forgetting and temporal drifting. As exploration proceeds, previously observed regions fall outside the model's temporal context, forcing the model to hallucinate structures when revisited. Meanwhile, autoregressive generation accumulates small synthesis errors over time, gradually distorting scene appearance and geometry. We present Lyra 2.0, a framework for generating persistent, explorable 3D worlds at scale. To address spatial forgetting, we maintain per-frame 3D geometry and use it solely for information routing -- retrieving relevant past frames and establishing dense correspondences with the target viewpoints -- while relying on the generative prior for appearance synthesis. To address temporal drifting, we train with self-augmented histories that expose the model to its own degraded outputs, teaching it to correct drift rather than propagate it. Together, these enable substantially longer and 3D-consistent video trajectories, which we leverage to fine-tune feed-forward reconstruction models that reliably recover high-quality 3D scenes.
MoRight: Motion Control Done Right
Apr 08, 2026Generating motion-controlled videos--where user-specified actions drive physically plausible scene dynamics under freely chosen viewpoints--demands two capabilities: (1) disentangled motion control, allowing users to separately control the object motion and adjust camera viewpoint; and (2) motion causality, ensuring that user-driven actions trigger coherent reactions from other objects rather than merely displacing pixels. Existing methods fall short on both fronts: they entangle camera and object motion into a single tracking signal and treat motion as kinematic displacement without modeling causal relationships between object motion. We introduce MoRight, a unified framework that addresses both limitations through disentangled motion modeling. Object motion is specified in a canonical static-view and transferred to an arbitrary target camera viewpoint via temporal cross-view attention, enabling disentangled camera and object control. We further decompose motion into active (user-driven) and passive (consequence) components, training the model to learn motion causality from data. At inference, users can either supply active motion and MoRight predicts consequences (forward reasoning), or specify desired passive outcomes and MoRight recovers plausible driving actions (inverse reasoning), all while freely adjusting the camera viewpoint. Experiments on three benchmarks demonstrate state-of-the-art performance in generation quality, motion controllability, and interaction awareness.
Kimodo: Scaling Controllable Human Motion Generation
Mar 16, 2026High-quality human motion data is becoming increasingly important for applications in robotics, simulation, and entertainment. Recent generative models offer a potential data source, enabling human motion synthesis through intuitive inputs like text prompts or kinematic constraints on poses. However, the small scale of public mocap datasets has limited the motion quality, control accuracy, and generalization of these models. In this work, we introduce Kimodo, an expressive and controllable kinematic motion diffusion model trained on 700 hours of optical motion capture data. Our model generates high-quality motions while being easily controlled through text and a comprehensive suite of kinematic constraints including full-body keyframes, sparse joint positions/rotations, 2D waypoints, and dense 2D paths. This is enabled through a carefully designed motion representation and two-stage denoiser architecture that decomposes root and body prediction to minimize motion artifacts while allowing for flexible constraint conditioning. Experiments on the large-scale mocap dataset justify key design decisions and analyze how the scaling of dataset size and model size affect performance.
DiffusionHarmonizer: Bridging Neural Reconstruction and Photorealistic Simulation with Online Diffusion Enhancer
Mar 05, 2026Simulation is essential to the development and evaluation of autonomous robots such as self-driving vehicles. Neural reconstruction is emerging as a promising solution as it enables simulating a wide variety of scenarios from real-world data alone in an automated and scalable way. However, while methods such as NeRF and 3D Gaussian Splatting can produce visually compelling results, they often exhibit artifacts particularly when rendering novel views, and fail to realistically integrate inserted dynamic objects, especially when they were captured from different scenes. To overcome these limitations, we introduce DiffusionHarmonizer, an online generative enhancement framework that transforms renderings from such imperfect scenes into temporally consistent outputs while improving their realism. At its core is a single-step temporally-conditioned enhancer that is converted from a pretrained multi-step image diffusion model, capable of running in online simulators on a single GPU. The key to training it effectively is a custom data curation pipeline that constructs synthetic-real pairs emphasizing appearance harmonization, artifact correction, and lighting realism. The result is a scalable system that significantly elevates simulation fidelity in both research and production environments.
Motion Attribution for Video Generation
Jan 13, 2026Despite the rapid progress of video generation models, the role of data in influencing motion is poorly understood. We present Motive (MOTIon attribution for Video gEneration), a motion-centric, gradient-based data attribution framework that scales to modern, large, high-quality video datasets and models. We use this to study which fine-tuning clips improve or degrade temporal dynamics. Motive isolates temporal dynamics from static appearance via motion-weighted loss masks, yielding efficient and scalable motion-specific influence computation. On text-to-video models, Motive identifies clips that strongly affect motion and guides data curation that improves temporal consistency and physical plausibility. With Motive-selected high-influence data, our method improves both motion smoothness and dynamic degree on VBench, achieving a 74.1% human preference win rate compared with the pretrained base model. To our knowledge, this is the first framework to attribute motion rather than visual appearance in video generative models and to use it to curate fine-tuning data.
RadarGen: Automotive Radar Point Cloud Generation from Cameras
Dec 19, 2025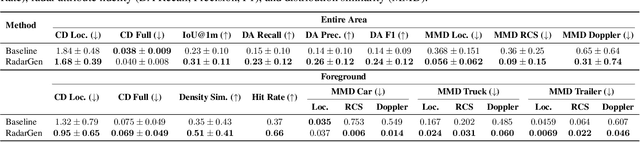
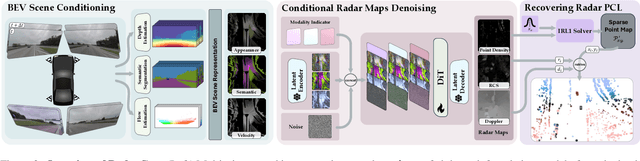
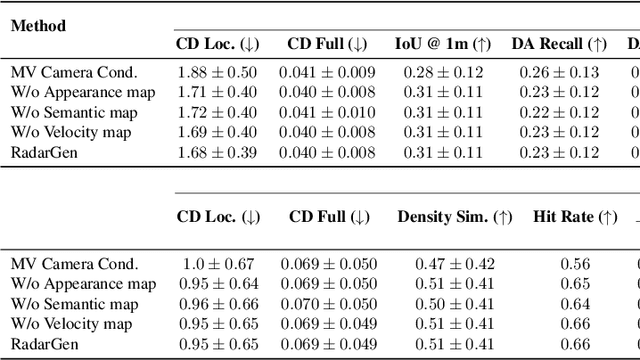
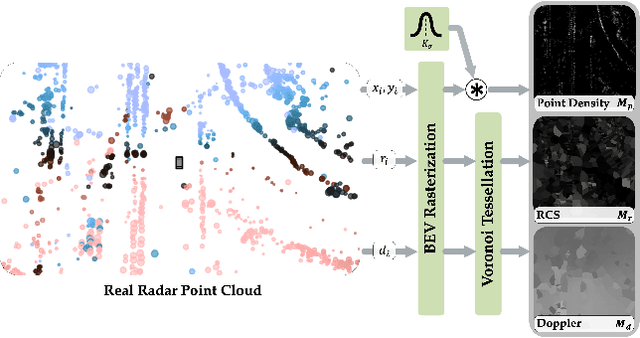
We present RadarGen, a diffusion model for synthesizing realistic automotive radar point clouds from multi-view camera imagery. RadarGen adapts efficient image-latent diffusion to the radar domain by representing radar measurements in bird's-eye-view form that encodes spatial structure together with radar cross section (RCS) and Doppler attributes. A lightweight recovery step reconstructs point clouds from the generated maps. To better align generation with the visual scene, RadarGen incorporates BEV-aligned depth, semantic, and motion cues extracted from pretrained foundation models, which guide the stochastic generation process toward physically plausible radar patterns. Conditioning on images makes the approach broadly compatible, in principle, with existing visual datasets and simulation frameworks, offering a scalable direction for multimodal generative simulation. Evaluations on large-scale driving data show that RadarGen captures characteristic radar measurement distributions and reduces the gap to perception models trained on real data, marking a step toward unified generative simulation across sensing modalities.